はじめに
拡大と回転と並進とによって実現する幾何学変換に相似変換があります.これは,画像間の位置合わせ等に用いられます. 具体的には,互いに対応する点\({x_{i}}\) と\(y_{i}\left(i = 1, 2, \dots n \right)\) が与えられた時,それらの間に存在する相似変換を推定するといったものです.
これを実現アルゴリズムにS.Umeyamaによって提案された手法があります.古典的な手法ではありますが,実用的なアルゴリズムであると思います.scikit-imageにおけるSimilalityTransform でも使用されています.
やったこと
Least-Squares Estimation of Transformation Parameters Between Two Point Patternsによる提案手法を読む
Pythonによる簡易的な実装
行列の性質復習
以下にこれから利用する行列の性質を示します.ここで,\(\mathbf A = \left(a_{i,j}\right)\) 及び\(\mathbf B = \left(b_{i,j}\right)\) は行列を,\(\left<\cdot, \cdot\right>\) は行列の内積を表します.
\[
\begin{aligned}
\mathrm {tr} \mathbf A &= \mathrm {tr} \mathbf A^{\mathrm T} \\
\mathrm {tr} \mathbf A \mathbf B \mathbf C &= \mathrm {tr} \mathbf B \mathbf C \mathbf A \\
\mathrm {tr} \mathbf A^{\mathrm T} \mathbf B &= \left<\mathbf A, \mathbf B \right> \\
&= \left\|\mathbf A \mathbf B \right\|^{2} \\
\frac{\partial}{\partial \mathbf A} \mathrm {tr} \left(\mathbf A \mathbf B\right) &= \mathbf B^{T} \\
\frac{\partial}{\partial \mathbf A} \mathrm {tr} \left(\mathbf A^{\mathrm T} \mathbf B\right) &= \mathbf B \\
\frac{\partial}{\partial \mathbf A} \mathrm {tr} \left(f\left(\mathbf A\right) g\left(\mathbf A\right)\right) &= \frac{\partial}{\partial \mathbf A_{1}} \mathrm {tr} \left(f\left(\mathbf A_{1}\right) g\left(\mathbf A\right)\right) + \frac{\partial}{\partial \mathbf A_{2}} \mathrm {tr} \left(f\left(\mathbf A\right) g\left(\mathbf A_{2}\right)\right) \\
\left<\mathbf A, \mathbf B \right> &= \mathrm {tr} \mathbf A^{\mathrm T} B \\
&= \sum_{i,j} a_{j,i}b_{i,j}
\end{aligned}
\]
相似変換について
上述したとおり,相似変換とは拡大と回転と並進とによって実現する幾何学的変換です.従って,変換元を\(\mathbf x\) ,変換先を\(\mathbf x'\) ,拡大率,回転行列,並進ベクトルをそれぞれ\(\left(c, \mathbf R, \mathbf t \right)\) とすると
\[
\begin{aligned}
\mathbf x' &= c\mathbf R \mathbf x + \mathbf t
\end{aligned}
\]
と表されます.
ここで,特徴点\(\mathbf x_{i}\) と,その相似変換による変換\(\mathbf y_{i}\ \left(i = 1, 2, \dots , n \right)\) を観測した場合を考えます.この時,以下の\(e\left(c, \mathbf R, \mathbf t\right)\) を最小化することで,\(\mathbf x_{i}\) と\(\mathbf y_{i}\) から相似変換のパラメータ\(\left(c, \mathbf R, \mathbf t \right)\) を推定することができます.
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t\right) &= \frac{1}{n} \sum_{i=1}^{n} \left| \mathbf y_{i} - \left(c\mathbf R \mathbf x_{i} + \mathbf t\right)\right|^{2}
\end{aligned}
\]
回転行列の推定
相似変換に推定の先立ち,まずは以下の式を最小化する\(\mathbf R\) を推定することを考えます.ここで,\(\mathbf A\) 及び\(\mathbf B\) は\(m \times n\) の行列を,\(\mathbf R\) は\(m \times m\) の行列を表します.
\[
\begin{alignedat}{4}
\text{minimize} & \ \ \ \ \ & \left\| \mathbf A - \mathbf R \mathbf B\right\|^{2} & \\
\text{subject to} &\ &\left|\mathbf R \right| &= 1& \\
&\ & \mathbf R\mathbf R^{\mathrm T} &= \mathbf I
\end{alignedat}
\]
\(\mathbf R\) を適切に推定するためには,与えられた束縛条件の元で目的関数を最小化する必要があります.従って,ラグランジュの未定乗数法を用います.ここでは,ラグランジュ関数\(F\) は以下の様に表されます.なお,\(l_{i,j}\) 及び\(g\) はラグランジュ乗数となります.
\[
\begin{aligned}
F &= \left\|\mathbf A - \mathbf R \mathbf B \right\|^{2} + \sum_{i=1}^{m} \sum_{j=1}^{m} l_{i,j} \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)_{i,j} + g\left(\left|\mathbf R \right| - 1 \right)
\end{aligned}
\]
上式において,\(\mathbf R^{\mathrm T}\mathbf R\) と\(\mathbf I\) は対象行列です.従って,それらの差である$ (R^{T}R - I )\(も対象行列となります.\) (R^{T}R - I )$が対象行列であるならば,対象な成分に対応するラグランジュ乗数も同様に等しくなります.すなわち,
\[
\begin{aligned}
l_{i,j} &= l_{j,i}
\end{aligned}
\]
となります.従って,ラグランジュ関数の第2項は以下の様に表現することが可能です.
\[
\begin{aligned}
\sum_{i=1}^{m} \sum_{j=1}^{m} l_{i,j} \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)_{i,j} &= \left< \left(l_{i,j}\right), \mathbf R^{\mathrm T}\mathbf R - \mathbf I \right>\\
&= \mathrm{tr} \left(\left(l_{j,i}\right) \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)\right)\\
&= \mathrm{tr} \left(\left(l_{i,j}\right) \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)\right)\\
\end{aligned}
\]
ここで,
\[
\begin{aligned}
\mathbf L &= \left(l_{i,j} \right)
\end{aligned}
\]
と置くと,
\[
\begin{aligned}
\mathrm{tr} \left(\left(l_{i,j}\right) \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)\right) &= \mathrm{tr}\left( \mathbf L \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right)\right)\\
\end{aligned}
\]
と表すことができます.従って,ラグランジュ関数\(F\) は以下の様に表現されます.
\[
\begin{aligned}
F &= \left\|\mathbf A - \mathbf R \mathbf B \right\|^{2} + \mathrm{tr} \left(\mathbf L \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right) \right) + g\left(\left|\mathbf R \right| - 1 \right) \\
\end{aligned}
\]
\(F\) を最小化する\(\mathbf R\) を求めるためには,以下の式を\(\mathbf R\) について解く必要があります.
\[
\begin{aligned}
\frac{\partial F}{\partial \mathbf R} &= \frac{\partial}{\partial \mathbf R} \left\|\mathbf A - \mathbf R \mathbf B \right\|^{2} + \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf L \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right) \right) +\frac{\partial}{\partial \mathbf R} g\left(\left|\mathbf R \right| - 1 \right) \\
&= 0
\end{aligned}
\]
まずは,右辺第1項について考えます.
\[
\begin{aligned}
\frac{\partial}{\partial \mathbf R} \left\|\mathbf A - \mathbf R \mathbf B \right\|^{2} &= \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\left(\mathbf A - \mathbf R \mathbf B \right)^{\mathrm T}\left(\mathbf A - \mathbf R \mathbf B \right)\right) \\
&= \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf A^{\mathrm T} \mathbf A - \mathbf A^{\mathrm T}\mathbf R \mathbf B - \mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf A + \mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf R \mathbf B\right) \\
&= \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf A^{\mathrm T} \mathbf A\right) - \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf A^{\mathrm T}\mathbf R \mathbf B\right) + \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf A \right) +\frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf R \mathbf B\right) \\
&= - \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf B \mathbf A^{\mathrm T}\mathbf R\right) - \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf A\mathbf B^{\mathrm T}\mathbf R^{\mathrm T}\right) +\frac{\partial}{\partial \mathbf R_{1}} \mathrm{tr} \left(\mathbf B^{\mathrm T}\mathbf R_{1}^{\mathrm T} \mathbf R \mathbf B\right) +\frac{\partial}{\partial \mathbf R_{2}} \mathrm{tr} \left(\mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf R_{2} \mathbf B\right) \\ \\
&= - \mathbf A \mathbf B^{\mathrm T} - \mathbf A\mathbf B^{\mathrm T} + \frac{\partial}{\partial \mathbf R_{1}} \mathrm{tr} \left(\mathbf R_{1}^{\mathrm T} \mathbf R \mathbf B\mathbf B^{\mathrm T}\right) +\frac{\partial}{\partial \mathbf R_{2}} \mathrm{tr} \left(\mathbf B\mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf R_{2}\right) \\ \\
&= -2 \mathbf A \mathbf B^{\mathrm T} + \mathbf R \mathbf B \mathbf B^{\mathrm T} + \left(\mathbf B \mathbf B^{\mathrm T} \mathbf R^{\mathrm T} \right)^{\mathrm T} \\
&= -2 \mathbf A \mathbf B^{\mathrm T} + \mathbf R \mathbf B \mathbf B^{\mathrm T} + \mathbf R \mathbf B \mathbf B^{\mathrm T} \\
&= -2 \mathbf A \mathbf B^{\mathrm T} + 2\mathbf R \mathbf B \mathbf B^{\mathrm T}
\end{aligned}
\]
次に,右辺第2項について考えます.
\[
\begin{aligned}
\frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf L \left(\mathbf R^{\mathrm T}\mathbf R - \mathbf I \right) \right) &= \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf L \mathbf R^{\mathrm T}\mathbf R \right) - \frac{\partial}{\partial \mathbf R} \mathrm{tr} \left(\mathbf L\right) \\
&= \frac{\partial}{\partial \mathbf R_{1}} \mathrm {tr} \left(\mathbf L \mathbf R_{1}^{\mathrm T} \mathbf R \right) + \frac{\partial}{\partial \mathbf R_{2}} \mathrm {tr} \left(\mathbf L \mathbf R^{\mathrm T} \mathbf R_{2} \right) \\
&= \frac{\partial}{\partial \mathbf R_{1}} \mathrm {tr} \left(\mathbf R \mathbf L \mathbf R_{1}^{\mathrm T}\right) + \left(\mathbf L \mathbf R^{\mathrm T}\right)^{\mathrm T} \\
&= \mathbf R \mathbf L + \mathbf R \mathbf L^{\mathrm T}\\
&= \mathbf R \mathbf L + \mathbf R \mathbf L\\
&= 2\mathbf R \mathbf L \\
\end{aligned}
\]
最後に,右辺第3項について考えます.
\[
\begin{aligned}
\frac{\partial}{\partial \mathbf R} g\left(\left|\mathbf R \right| - 1 \right) &= g \frac{\partial}{\partial \mathbf R} \left|\mathbf R \right|\\
&= g \mathbf{R}\\
\end{aligned}
\]
以上の結果より,
\[
\begin{aligned}
\frac{\partial F}{\partial \mathbf R} &= -2 \mathbf A \mathbf B^{\mathrm T} + 2\mathbf R \mathbf B \mathbf B^{\mathrm T} + 2\mathbf R \mathbf L +g \mathbf{R} \\
&= 0\\
\end{aligned}
\]
と表現することができます.上式を整理すると,
\[
\begin{aligned}
2\mathbf R \mathbf B \mathbf B^{\mathrm T} + 2\mathbf R \mathbf L +g \mathbf{R} &=2 \mathbf A \mathbf B^{\mathrm T} \\
\mathbf R\left(\mathbf B \mathbf B^{\mathrm T} + \mathbf L + \frac{1}{2}g \mathbf I \right) &= \mathbf A \mathbf B^{\mathrm T} \\
\end{aligned}
\]
と表すことができます.ここで,
\[
\begin{aligned}
\mathbf L' &= \mathbf B \mathbf B^{\mathrm T} + \mathbf L + \frac{1}{2}g \mathbf I
\end{aligned}
\]
と置きます.すると,
\[
\begin{aligned}
\mathbf R\mathbf L' &= \mathbf A \mathbf B^{\mathrm T} \\
\mathbf L'^{\mathrm T}\mathbf R^{\mathrm T} &= \mathbf B \mathbf A^{\mathrm T} \\
\end{aligned}
\]
となります.\(\mathbf B \mathbf B^{\mathrm T}\) ,\(\mathbf L\) 及び\(\mathbf I\) は全て対象行列です.従って,
\[
\begin{aligned}
\mathbf L' &= \mathbf L'^{\mathrm T}
\end{aligned}
\]
という関係が成立します.従って,
\[
\begin{aligned}
\mathbf L'\mathbf R^{\mathrm T} &= \mathbf B \mathbf A^{\mathrm T} \\
\end{aligned}
\]
となります.ここで,両辺にそれぞれ自身の転置を掛けると,
\[
\begin{aligned}
\mathbf L'\mathbf R^{\mathrm T} \left(\mathbf L'\mathbf R^{\mathrm T} \right)^{\mathrm T} &= \mathbf L'\mathbf R^{\mathrm T} \mathbf R \mathbf L'^{\mathrm T}\\
&= \mathbf L'\mathbf L'^{\mathrm T} \\
&= \mathbf L'^{2}\\
&= \mathbf B \mathbf A^{\mathrm T} \left(\mathbf B \mathbf A^{\mathrm T} \right)^{\mathrm T} \\
\end{aligned}
\]
となります.また,\(\mathbf A\mathbf B^{\mathrm T}\) の特異値分解を以下の様に置きます.
\[
\begin{aligned}
\mathbf A\mathbf B^{\mathrm T} &= \mathbf U \mathbf D \mathbf V^{\mathrm T}
\end{aligned}
\]
すると,
\[
\begin{aligned}
\mathbf L'^{2} &= \left(\mathbf U \mathbf D \mathbf V^{\mathrm T} \right)^{\mathrm T} \mathbf U \mathbf D \mathbf V^{\mathrm T} \\
&= \mathbf V \mathbf D \mathbf U^{\mathrm T}\mathbf U \mathbf D \mathbf V^{\mathrm T} \\
&= \mathbf V \mathbf D^{2} \mathbf V^{\mathrm T} \\
\end{aligned}
\]
であり,
\[
\begin{aligned}
\mathbf L' &= \mathbf V \sqrt{\mathbf D^{2}} \mathbf V^{\mathrm T} \\
&= \mathbf V \begin{pmatrix}
\ddots & & \\
& \sqrt{d_{i}^{2}}& \\
& & \ddots\\
\end{pmatrix}
\mathbf V^{\mathrm T} \\
&= \mathbf V \begin{pmatrix}
\ddots & & \\
& d_{i}s_{i}& \\
& & \ddots\\
\end{pmatrix}
\mathbf V^{\mathrm T} \\
&= \mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T}
\end{aligned}
\]
と表すことができます.なお,\(\mathbf S = \mathop{\rm diag}s_{i}\ \left(s_{i} = \pm1\right)\) となります.
次に,上式の両辺に対して行列式を考えます.すると,
\[
\begin{aligned}
\left| \mathbf L' \right| &= \left| \mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T} \right| \\
&= \left| \mathbf V \right| \cdot \left| \mathbf D\right| \cdot \left| \mathbf S\right| \cdot \left| \mathbf V^{\mathrm T} \right| \\
\end{aligned}
\]
であり,\(\left|\mathbf V\right| = \left|\mathbf V^{\mathrm T}\right| = 1\) より,
\[
\begin{aligned}
&= \left| \mathbf D\right| \cdot \left| \mathbf S\right| \\
\end{aligned}
\]
また,
\[
\begin{aligned}
\mathbf R\mathbf L' &= \mathbf A \mathbf B^{\mathrm T} \\
\mathbf R^{\mathrm T}\mathbf R\mathbf L' &= \mathbf R^{\mathrm T}\mathbf A \mathbf B^{\mathrm T} \\
\mathbf L' &= \mathbf R^{\mathrm T}\mathbf A \mathbf B^{\mathrm T} \\
\end{aligned}
\]
であることから,
\[
\begin{aligned}
\left| \mathbf L' \right| &= \left| \mathbf R^{\mathrm T} \right| \cdot \left| \mathbf A \mathbf B^{\mathrm T} \right| \\
&= \left| \mathbf A \mathbf B^{\mathrm T} \right| \\
\end{aligned}
\]
となります.従って, \[
\begin{aligned}
\left| \mathbf D\right| \cdot \left| \mathbf S\right| &= \left| \mathbf A \mathbf B^{\mathrm T} \right| \\
\end{aligned}
\]
と表すことができます.また,特異値の性質より,\(d_{i} \geq 0\) であるため,
\[
\begin{aligned}
\left| \mathbf D\right| &\geq 0 \\
\end{aligned}
\]
となります.従って,
\[
\begin{aligned}
\left| \mathbf S\right|&= \begin{cases}
1 & \ \ \ \text{if}\ \ \left| \mathbf A \mathbf B^{\mathrm T} \right| \geq 0 \\
-1 &\ \ \ \text{if}\ \ \left| \mathbf A \mathbf B^{\mathrm T} \right| \leq 0
\end{cases}
\end{aligned}
\]
となります.ここで,\(\left| \mathbf A - \mathbf R \mathbf B\right|^{2}\) の最小化について考えます.以上の結果より\(\left| \mathbf A - \mathbf R \mathbf B\right|^{2}\) は,
\[
\begin{aligned}
\left\| \mathbf A - \mathbf R \mathbf B\right\|^{2} &= \mathrm{tr} \left(\left(\mathbf A - \mathbf R \mathbf B\right)^{\mathrm T} \left(\mathbf A - \mathbf R \mathbf B\right) \right) \\
&= \mathrm{tr}\left(\mathbf A^{\mathrm T}\mathbf A\right) - \mathrm{tr} \left(\mathbf A^{\mathrm T}\mathbf R \mathbf B\right)
- \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right) + \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf R \mathbf B\right)\\
&= \left\|\mathbf A\right\|^{2} - \mathrm{tr} \left(\left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right)^{\mathrm T}\right) - \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right) + \mathrm{tr} \left(\mathbf B^{\mathrm T} \mathbf R^{\mathrm T}\mathbf R \mathbf B\right)\\
&= \left\|\mathbf A\right\|^{2} - \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right) - \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right) + \mathrm{tr} \left(\mathbf B^{\mathrm T} \mathbf B\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} - 2 \mathrm{tr} \left(\left(\mathbf R \mathbf B\right)^{\mathrm T}\mathbf A\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} - 2 \mathrm{tr} \left(\mathbf B^{\mathrm T}\mathbf R^{\mathrm T} \mathbf A\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} - 2 \mathrm{tr} \left(\mathbf R^{\mathrm T} \mathbf A\mathbf B^{\mathrm T}\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} - 2 \mathrm{tr} \left(\mathbf L'\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} -2 \mathrm{tr} \left(\mathbf V\mathbf D\mathbf S\mathbf V^{\mathrm T}\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} -2 \mathrm{tr} \left(\mathbf D\mathbf S\mathbf V^{\mathrm T}\mathbf V\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} -2 \mathrm{tr} \left(\mathbf D\mathbf S\right)\\
&= \left\|\mathbf A\right\|^{2} + \left\|\mathbf B\right\|^{2} -2 \left(d_{1}s_{1} + d_{2}s_{2} + \cdots + d_{m}s_{m} \right)\\
\end{aligned}
\]
と表すことができます.ここで,\(\mathbf A\) ,\(\mathbf B\) ,\(d_{i}\) が問題より与えられており,\(\left\|\mathbf A\right\|^{2} \ge 0\) ,\(\left\|\mathbf B\right\|^{2} \ge 0\) となります.従って,\(\text{minimize}\ \left\| \mathbf A - \mathbf R \mathbf B\right\|^{2}\) は以下の様に書き換えることができます.
\[
\begin{alignedat}{4}
\text{maximize} & \ \ \ \ \ & d_{1}s_{1} + d_{2}s_{2} + \cdots + d_{m}s_{m} & \\
\text{subject to} &\ & s_{1}s_{2} \cdots s_{m} &= \begin{cases}
1 & \ \ \ \text{if}\ \ \left| \mathbf A \mathbf B^{\mathrm T} \right| \geq 0 \\
-1 & \ \ \ \text{if}\ \ \left| \mathbf A \mathbf B^{\mathrm T} \right| \leq 0
\end{cases}& \\
&\ & \left| s_{i} \right| &= 1
\end{alignedat}
\]
まず,\(\left| \mathbf A \mathbf B^{\mathrm T} \right| \geq 0\) の場合について考えます.この時,\(s_{i}=1\) で目的関数が最大化することは明らかです.次に,$ | A B^{T} | \(の場合について考えます.\) d_{1} d_{2} d_{m}\(であるため,\) s_{1} = s_{2} = = s_{m-1} = 1\(,\) s_{m} = -1$で目的関数が最大化します.
最後に,以上の結果を元に実際に\(\mathbf R\) を求めていきます.まず,\(\mathrm{rank}\left(\mathbf A \mathbf B^{\mathrm T}\right) = m\) である場合を考えます.この時,\(\mathbf L'\) は正則行列となります.よって,
\[
\begin{aligned}
\mathbf L'^{-1} &= \left(\mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T}\right)^{-1} \\
&= \left( \mathbf V^{\mathrm T} \right)^{-1} \mathbf S^{-1} \mathbf D^{-1} \mathbf V^{-1} \\
&= \mathbf V \mathbf S \mathbf D^{-1} \mathbf V^{\mathrm T} \\
&= \mathbf V \mathbf D^{-1}\mathbf S \mathbf V^{\mathrm T}
\end{aligned}
\]
となります.従って,
\[
\begin{aligned}
\mathbf R &= \mathbf A \mathbf B^{\mathrm T} \mathbf L'^{-1} \\
&= \mathbf U \mathbf D \mathbf V^{\mathrm T} \mathbf V \mathbf D^{-1} \mathbf S \mathbf V^{\mathrm T}\\
&= \mathbf U \mathbf S \mathbf V^{\mathrm T}
\end{aligned}
\]
となります.次に,\(\mathrm{rank}\left(\mathbf A \mathbf B^{\mathrm T}\right) = m-1\) である場合を考えます.
\[
\begin{aligned}
\mathbf A \mathbf B^{\mathrm T} &=\mathbf U \mathbf D \mathbf V^{\mathrm T}\\
\mathbf L' &= \mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T} \\
\mathbf R\mathbf L' &= \mathbf A \mathbf B^{\mathrm T} \\
\end{aligned}
\]
であるため, \[
\begin{aligned}
\mathbf R\mathbf L' &= \mathbf A \mathbf B^{\mathrm T}\\
\mathbf R\left(\mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T} \right) &= \mathbf U \mathbf D \mathbf V^{\mathrm T}\\
\mathbf R\mathbf V \mathbf D \mathbf S \mathbf V^{\mathrm T} \mathbf V &= \mathbf U \mathbf D \mathbf V^{\mathrm T}\mathbf V\\
\mathbf R\mathbf V \mathbf D \mathbf S &= \mathbf U \mathbf D \\
\end{aligned}
\]
ここで,\(\mathrm{rank}\left(\mathbf A \mathbf B^{\mathrm T}\right) = m-1\) であるため,\(d_{m} = 0\) となります.また,\(s_{1} = s_{2} = \cdots = s_{m} = 1\) であるため,
\[
\begin{aligned}
\mathbf D\mathbf S &= \mathbf D\\
\end{aligned}
\]
となります.よって,
\[
\begin{aligned}
\mathbf R\mathbf V \mathbf D &= \mathbf U \mathbf D \\
\end{aligned}
\]
ここで, \[
\begin{aligned}
\mathbf Q &= \mathbf U^{\mathrm T} \mathbf R\mathbf V \\
\left| \mathbf Q \right| &= \left| \mathbf U^{\mathrm T} \mathbf R\mathbf V \right|\\
&= \left| \mathbf U^{\mathrm T}\right|\left| \mathbf R\right| \left|\mathbf V \right|\\
&= \left| \mathbf U\right|\left|\mathbf V \right|
\end{aligned}
\]
と置くと,
\[
\begin{aligned}
\mathbf U^{\mathrm T} \mathbf R\mathbf V \mathbf D &=\mathbf U^{\mathrm T} \mathbf U \mathbf D \\
\mathbf Q\mathbf D &= \mathbf D \\
\end{aligned}
\]
と表すことができます.さらに
\[
\begin{aligned}
\mathbf Q &= \left(\mathbf q_{1} \mathbf q_{2} \cdots \mathbf q_{m} \right)\\
\mathbf e_{i} &= \left(e_{i,1}, e_{i,2}, \cdots, e_{i,m}\right)^{\mathrm T} \\
e_{i,j} &= \begin{cases}
0 & \ \ \ \text{otherwise} \\
1 & \ \ \ \text{if}\ \ i=j
\end{cases}
\end{aligned}
\]
と置くと,
\[
\begin{aligned}
d_{i} \mathbf q_{i} &= d_{i}\mathbf e_{i} \\
\mathbf q_{i} &= \mathbf e_{i} \ \left( 1 \leq i \leq m - 1\right)
\end{aligned}
\]
となります.また,\(\mathbf U\) , \(\mathbf R\) , \(\mathbf V\) は全て直交行列です.従って\(\mathbf Q\) も同様に直交行列となります.そのため,\(\mathbf q_{m}\) は\(\mathbf q_{1} \cdots \mathbf q_{m-1}\) と直交します.従って,
\[
\begin{aligned}
\mathbf q_{m} = \begin{cases}
\mathbf e_{m} & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = 1\\
-\mathbf e_{m} & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = -1
\end{cases}
\end{aligned}
\]
となります.以上の結果より,
\[
\begin{aligned}
\mathrm{svd} \left(\mathbf A\mathbf B^{\mathrm T}\right) &= \mathbf U \mathbf D \mathbf V^{\mathrm T}\\
\mathbf S &= \begin{cases}
\mathbf I & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = 1\\
\mathrm{diag} \ \left(1, 1, \cdots, 1, -1\right) & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = -1
\end{cases}\\
\mathbf R &= \mathbf U \mathbf Q \mathbf V^{\mathrm T}\\
&= \mathbf U \mathbf S \mathbf V^{\mathrm T}\\
\end{aligned}
\]
相似変換の推定
前述した通り,相似変換は以下の\(e^{2}\left(c, \mathbf R, \mathbf t\right)\) を最小化する\(c, \mathbf R, \mathbf t\) を求めることによって与えられます.
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t\right) &= \frac{1}{n} \sum_{i=1}^{n} \left| \mathbf y_{i} - \left(c\mathbf R \mathbf x_{i} + \mathbf t\right)\right|^{2}
\end{aligned}
\]
ここで,\(\mathbf X= \left(\mathbf x_{1}, \mathbf x_{2}, \cdots, \mathbf x_{n}\right)\) ,\(\mathbf Y= \left(\mathbf y_{1}, \mathbf y_{2}, \cdots, \mathbf y_{n}\right)\) ,\(\mathbf h = \left(1, 1, \cdots, 1\right)^{\mathrm T}\) と置くと,
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t\right) &= \frac{1}{n} \left\| \mathbf Y - c \mathbf R \mathbf X -\mathbf t \mathbf h^{\mathrm T} \right\|^{\mathrm 2}
\end{aligned}
\]
と表現することができます.また,
\[
\begin{aligned}
\mathbf K &= \mathbf I - \frac{1}{n} \mathbf h \mathbf h^{\mathrm T} \\
\mathbf K &= \mathbf K^{\mathrm T}\\
\mathbf K \mathbf K^{\mathrm T} &= \mathbf K
\end{aligned}
\]
とすると,
\[
\begin{aligned}
\mathbf X\mathbf K &= \mathbf X\left(\mathbf I - \frac{1}{n} \mathbf h \mathbf h^{\mathrm T} \right)\\
&= \mathbf X - \frac{1}{n}\mathbf X\mathbf h \mathbf h^{\mathrm T}\\
\mathbf X &= \mathbf X\mathbf K + \frac{1}{n}\mathbf X \mathbf h \mathbf h^{\mathrm T}
\end{aligned}
\]
であり,同様に,
\[
\begin{aligned}
\mathbf Y &= \mathbf Y\mathbf K + \frac{1}{n}\mathbf Y \mathbf h \mathbf h^{\mathrm T}
\end{aligned}
\]
これらを用いて,\(e^{2}\left(c, \mathbf R, \mathbf t\right)\) を表すと,
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t\right) &= \frac{1}{n} \left\| \mathbf Y\mathbf K + \frac{1}{n}\mathbf Y \mathbf h \mathbf h^{\mathrm T} - c \mathbf R \left(\mathbf X\mathbf K + \frac{1}{n}\mathbf X \mathbf h \mathbf h^{\mathrm T}\right) -\mathbf t \mathbf h^{\mathrm T} \right\|^{\mathrm 2}\\
&= \frac{1}{n} \left\| \mathbf Y\mathbf K + \frac{1}{n}\mathbf Y \mathbf h \mathbf h^{\mathrm T} - c \mathbf R \mathbf X\mathbf K -\frac{c}{n}\mathbf R\mathbf X \mathbf h \mathbf h^{\mathrm T} -\mathbf t \mathbf h^{\mathrm T} \right\|^{\mathrm 2}\\
&= \frac{1}{n} \left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K + \left(\frac{1}{n}\mathbf Y \mathbf h -\frac{c}{n}\mathbf R\mathbf X \mathbf h -\mathbf t\right) \mathbf h^{\mathrm T} \right\|^{\mathrm 2}\\
&= \frac{1}{n} \left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K - \mathbf t' \mathbf h^{\mathrm T} \right\|^{\mathrm 2}\\
&= \frac{1}{n} \mathrm{tr}\left(\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K - \mathbf t' \mathbf h^{\mathrm T} \right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K - \mathbf t' \mathbf h^{\mathrm T} \right) \right)\\
&= \frac{1}{n} \mathrm{tr}\left(\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right) - \left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
-\left(\mathbf t' \mathbf h^{\mathrm T}\right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)
+\left(\mathbf t' \mathbf h^{\mathrm T}\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)\\
&= \frac{1}{n}\left\{
\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)
\right)
-\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
-\mathrm{tr}\left(
\left(\mathbf t' \mathbf h^{\mathrm T}\right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)\right)+\mathrm{tr}\left(
\left(\mathbf t' \mathbf h^{\mathrm T}\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
-\mathrm{tr}\left(\left(
\left(\mathbf t' \mathbf h^{\mathrm T}\right)^{\mathrm T}\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)
\right)^{\mathrm T}\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
-\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}
\left(\mathbf t' \mathbf h^{\mathrm T}\right)
\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-2\mathrm{tr}\left(
\left(\mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right)^{\mathrm T}\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-2\mathrm{tr}\left(
\left(\mathbf K^{\mathrm T}\mathbf Y^{\mathrm T} - c \mathbf K^{\mathrm T} \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-2\mathrm{tr}\left(\mathbf K^{\mathrm T}
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
\right\}\\
&= \frac{1}{n}\left\{
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} + \left\|\mathbf t' \mathbf h^{\mathrm T} \right\|^{2}
-2\mathrm{tr}\left(\mathbf K
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\left(\mathbf t' \mathbf h^{\mathrm T} \right)
\right)
\right\}\\
\end{aligned}
\]
なお,
\[
\begin{aligned}
\mathbf t' &= -\frac{1}{n}\mathbf Y \mathbf h +\frac{c}{n}\mathbf R\mathbf X \mathbf h +\mathbf t
\end{aligned}
\]
と置いています.ここで,右辺第3項について考えます. \[
\begin{aligned}
\mathrm{tr}\left(\mathbf K
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\mathbf t' \mathbf h^{\mathrm T}
\right) &=\mathrm{tr}\left(\mathbf h^{\mathrm T} \mathbf K
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\mathbf t'
\right) \\
&= \mathrm{tr}\left(\mathbf h^{\mathrm T} \left( \mathbf I - \frac{1}{n} \mathbf h \mathbf h^{\mathrm T} \right)
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\mathbf t'
\right) \\
&= \mathrm{tr}\left( \left( \mathbf h^{\mathrm T} - \frac{1}{n} \mathbf h^{\mathrm T}\mathbf h \mathbf h^{\mathrm T} \right)
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\mathbf t'
\right) \\
&= \mathrm{tr}\left( \left( \mathbf h^{\mathrm T} - \mathbf h^{\mathrm T} \right)
\left(\mathbf Y^{\mathrm T} - c \mathbf X^{\mathrm T}\mathbf R^{\mathrm T}\right)\mathbf t'
\right) \\
&= 0
\end{aligned}
\]
次に右辺第2項について考えます. \[
\begin{aligned}
\left\|\mathbf t'\mathbf h^{\mathrm T} \right\|^{2}&= n\left\| \mathbf t'\right\|^{2}
\end{aligned}
\]
以上の結果より,
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t\right) &= \frac{1}{n}
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2}
+ \left\| \mathbf t'\right\|^{2}
\end{aligned}
\]
と表されます.\(e^{2}\left(c, \mathbf R, \mathbf t\right)\) を最小化するために,\(\mathbf t'=0\) と置くと,
\[
\begin{aligned}
\mathbf t' &= -\frac{1}{n}\mathbf Y \mathbf h +\frac{c}{n}\mathbf R\mathbf X \mathbf h +\mathbf t\\
&= 0\\
\end{aligned}
\]
従って,
\[
\begin{aligned}
\mathbf t &= \frac{1}{n}\mathbf Y \mathbf h - \frac{c}{n}\mathbf R\mathbf X \mathbf h
\end{aligned}
\]
ここで, \[
\begin{aligned}
\mathbf{\mu_{y}} &= \frac{1}{n}\mathbf Y \mathbf h\\
\mathbf{\mu_{x}} &= \frac{1}{n}\mathbf X \mathbf h
\end{aligned}
\]
と置くと, \[
\begin{aligned}
\mathbf t &= \mathbf{\mu_{y}} - c\mathbf R\mathbf{\mu_{x}}
\end{aligned}
\]
並進成分が求まったので,再度評価関数\(e^{2}\) を書き下すと,
\[
\begin{aligned}
e^{2}\left(c, \mathbf R, \mathbf t = \mathbf{\mu_{y}} - c\mathbf R\mathbf{\mu_{x}}\right) &= \frac{1}{n}
\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2}
\end{aligned}
\]
ここで,\(\frac{1}{n}\mathbf Y \mathbf K \mathbf X^{\mathrm T}\) の特異値分解を以下の様に置きます. \[
\begin{aligned}
\frac{1}{n}\mathbf Y \mathbf K \mathbf X^{\mathrm T} &= \mathbf U \mathbf D \mathbf V^{\mathrm T}
\end{aligned}
\]
すると,
\[
\begin{aligned}
\left(\mathbf Y \mathbf K\right)\left(c\mathbf X \mathbf K\right)^{\mathrm T} &= c\mathbf Y \mathbf K \mathbf K^{\mathrm T}\mathbf X^{\mathrm T}\\
&= c \mathbf Y \mathbf K\mathbf X^{\mathrm T}\\
&= cn\mathbf U \mathbf D\mathbf V^{\mathrm T}\\
\end{aligned}
\]
また,回転行列の推定の結果より, \[
\begin{aligned}
\frac{1}{n}\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2} &= \frac{1}{n} \left\{
\left\|\mathbf Y \mathbf K\right\|^{2} + c^{2}\left\|\mathbf X \mathbf K\right\|^{2} - 2\mathrm{tr} \left(cn\mathbf U \mathbf D\mathbf V^{\mathrm T}\right)
\right\}
\end{aligned}
\]
上式を\(c\) について最小化すると,
\[
\begin{aligned}
\frac{\partial}{\partial c} \frac{1}{n}\left\| \mathbf Y\mathbf K - c \mathbf R \mathbf X\mathbf K\right\|^{2}&= \frac{1}{n} \left\{2 c\left\|\mathbf X \mathbf K\right\|^{2} - 2n\mathrm{tr} \left(\mathbf U \mathbf D\mathbf V^{\mathrm T}\right)
\right\}\\
&= 0\\
c &= \frac{\mathrm{tr} \left(\mathbf D\mathbf S\right)}{\frac{1}{n}\left\|\mathbf X\mathbf K\right\|^{2}}
\end{aligned}
\]
ここで,
\[
\begin{aligned}
\sigma_{x}^{2}&= \frac{1}{n}\left\|\mathbf X\mathbf K\right\|^{2}
\end{aligned}
\]
とおくと,
\[
\begin{aligned}
c &= \frac{\mathrm{tr} \left(\mathbf D\mathbf S\right)}{\sigma_{x}^{2}}
\end{aligned}
\]
また,回転行列\(\mathbf R\) についても同様に
\[
\begin{aligned}
\mathbf R &= \mathbf U \mathbf S \mathbf V^{\mathrm T}\\
\mathbf S &= \begin{cases}
\mathbf I & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = 1\\
\mathrm{diag} \ \left(1, 1, \cdots, 1, -1\right) & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = -1
\end{cases}\\
\end{aligned}
\]
以上の結果をまとめると, \[
\begin{aligned}
c &= \frac{\mathrm{tr} \left(\mathbf D\mathbf S\right)}{\sigma_{x}^{2}}\\
\mathbf R &= \mathbf U \mathbf S \mathbf V^{\mathrm T}\\
\mathbf S &= \begin{cases}
\mathbf I & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = 1\\
\mathrm{diag} \ \left(1, 1, \cdots, 1, -1\right) & \ \ \ \text{if}\ \ \left| \mathbf U\right|\left|\mathbf V \right| = -1
\end{cases}\\
\mathbf t &= \mathbf{\mu_{y}} - c\mathbf R\mathbf{\mu_{x}}\\
\end{aligned}
\]
Pythonによる実装
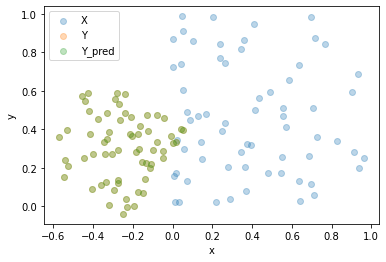
上述の方法をPythonで実装しました.青色の点が\(\mathbf X\) を,橙色の点が\(\mathbf Y\) を,緑色の点が\(c\mathbf R\mathbf X\) をそれぞれ表しています.橙色の点ど緑色の点が重なっていることから,パラメータの推定が適切に行われていることを確認できます.
import numpy as npfrom random import randomimport mathimport matplotlib.pyplot as plt= 64 = random() + 0.5 = math.pi * random()= math.cos(theta), math.sin(theta)= np.array([[cs, - ss], [ss, cs]])= np.random.rand(2 , 1 )= 0.0 * np.random.rand(2 , n)= np.random.rand(2 , n)= c * R @ X + t + noise= np.ones((n, 1 ))= np.eye(n) - 1 / n * h @ h.T= np.linalg.svd(Y @ K @ X.T / n) = np.diag([1 ,np.linalg.det(U) * np.linalg.det(V) ])= U @ S @ V.T= n * np.trace(np.diag(D) @ S) / np.trace(X @ K @ X.T)= ((Y @ h) - c_pred * R_pred @ X @ h) / n= c_pred * R_pred @ X + t_pred= plt.gca()"x" )"y" )= X[0 ,:], y = X[1 ,:], label= "X" , color= "tab:blue" , alpha= 0.3 )= Y[0 ,:], y = Y[1 ,:], label= "Y" , color= "tab:orange" , alpha= 0.3 )= Y_pred[0 ,:], y = Y_pred[1 ,:], label= "Y_pred" , color= "tab:green" , alpha= 0.3 )
参考
[1]
Petersen, K.B. et al. 2008. The matrix cookbook. Technical University of Denmark . 7, 15 (2008), 510.
[2]
Umeyama, S. 1991. Least-squares estimation of transformation parameters between two point patterns. IEEE Transactions on Pattern Analysis & Machine Intelligence . 13, 04 (1991), 376–380.